 README
¶
README
¶
gopigo
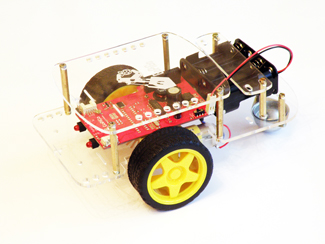
The GoPiGo is a delightful and complete robot for the Raspberry Pi that turns your Pi into a fully operating robot. GoPiGo is a mobile robotic platform for the Raspberry Pi developed by Dexter Industries.
This repository contains Go library for interacting with the GoPiGo robot. This is a port of python library of GoPiGo in Go language.
Getting Started
Get the source with: go get -d -u github.com/droot/gopigo
Simple example
package main
import (
"github.com/droot/gopigo"
"github.com/kidoman/embd"
_ "github.com/kidoman/embd/host/all"
)
func main() {
if err := embd.InitI2C(); err != nil {
panic(err)
}
defer embd.CloseI2C()
bus := embd.NewI2CBus(1)
// create GoPiGo instance.
gp := gopigo.New(bus)
// move GoPiGo forward by 40 cms
err := gp.fwd(40)
// move GoPiGo backward
err = gp.Bwd(0)
// make GoPiGo stop
err = gp.Stop()
// make GoPiGo take Left turn
err = gp.Left()
// make GoPiGo take right turn
err = gp.Right()
// Read Battery level of GoPiGo
volt, err := gp.BatteryVoltage()
.....
}
API Documentation
API documentation is available at https://godoc.org/github.com/droot/gopigo
Credits
Special Thanks to Dexter Industries for providing GoPiGo kit for the development.
Need help ?
- Issues: https://github.com/droot/gopigo/issues
- twitter: @droot
 Documentation
¶
Documentation
¶
Overview ¶
package gopigo implements APIs to control a GoPiGo robot. This package has been tested using Raspberry PI 3. If you have any trouble using it with older version of PIs, report it in Github issues.
Index ¶
- type GoPiGo
- func (p *GoPiGo) BatteryVoltage() (volt float32, err error)
- func (p *GoPiGo) Bwd(distance int) error
- func (p *GoPiGo) DecreaseSpeed() error
- func (p *GoPiGo) DirectMotor1(direction, speed byte) error
- func (p *GoPiGo) DirectMotor2(direction, speed byte) error
- func (p *GoPiGo) DisableEncoders() error
- func (p *GoPiGo) EnableEncoders() error
- func (p *GoPiGo) Fwd(distance int) error
- func (p *GoPiGo) IncreaseSpeed() error
- func (p *GoPiGo) Left() error
- func (p *GoPiGo) LeftRotate() error
- func (p *GoPiGo) Right() error
- func (p *GoPiGo) RightRotate() error
- func (p *GoPiGo) Stop() error
- func (p *GoPiGo) TurnLeft(degrees float64) error
- func (p *GoPiGo) TurnRight(degrees float64) error
Constants ¶
This section is empty.
Variables ¶
This section is empty.
Functions ¶
This section is empty.
Types ¶
type GoPiGo ¶
type GoPiGo struct {
// contains filtered or unexported fields
}
GoPiGo represents a GoPiGo device.
func (*GoPiGo) BatteryVoltage ¶
BatteryVoltage returns the Battery Voltage reading.
func (*GoPiGo) Bwd ¶
Bwd moves the GoPiGo backwards. It takes distance in cms as input. If distance is 0, it moves backward without stopping.
func (*GoPiGo) DecreaseSpeed ¶
DecreaseSpeed slows down GoPiGo by speed of 10.
func (*GoPiGo) DirectMotor1 ¶
DirectMotor1 sets the direction and speed of motor1.
func (*GoPiGo) DirectMotor2 ¶
DirectMotor2 sets the direction and speed of motor2.
func (*GoPiGo) DisableEncoders ¶
DisableEncoders disables encoders.
func (*GoPiGo) EnableEncoders ¶
EnableEncoders enables the encoders (enabled by default).
func (*GoPiGo) Fwd ¶
Fwd moves the GoPiGo forward. It takes distance in cms as input. If specified 0, it moves forward without stopping.
func (*GoPiGo) IncreaseSpeed ¶
IncreaseSpeed bumps up the motor's speed by 10.
func (*GoPiGo) LeftRotate ¶
LeftRotate turns GoPiGo left more aggresively by rotating both the wheels in reverse direction.
func (*GoPiGo) RightRotate ¶
RightRotate turns GoPiGo to the right aggresively.